
產(chǎn)品簡介PRODUCT DESCRIPTION

多機(jī)協(xié)同機(jī)器人實(shí)訓(xùn)開發(fā)平臺
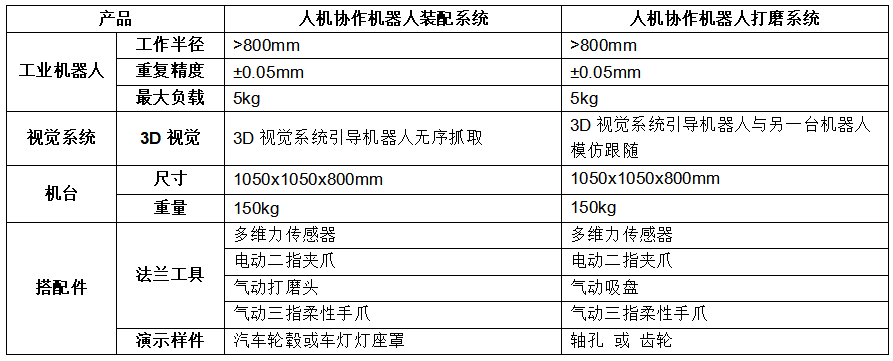
聯(lián)系電話:13720126958 / 13387619634人機(jī)協(xié)作機(jī)器人裝配系統(tǒng)采用六軸協(xié)作機(jī)器人,配合獨(dú)立的高精度六維力傳感器,實(shí)現(xiàn)軸孔或齒輪裝配等力位混合控制。人機(jī)協(xié)作機(jī)器人打磨系統(tǒng)主要通過協(xié)作機(jī)器人多維度的力反饋控制完成復(fù)雜3D輪廓產(chǎn)品的力控打磨。實(shí)驗(yàn)平臺用于功能任務(wù)實(shí)訓(xùn)或二次開發(fā),既適合學(xué)生入門培訓(xùn)和實(shí)驗(yàn),也可以適合企業(yè)項(xiàng)目前期仿真、工藝測試等研究。平臺采用模塊化設(shè)計(jì),能夠方便功能擴(kuò)展。
主要展示內(nèi)容:
1、軸孔或齒輪裝配等力位混合控制
2、多維度的力反饋控制完成復(fù)雜3D輪廓產(chǎn)品的力控打磨
3、3D視覺引導(dǎo)機(jī)器人無序抓取
4、柔性手抓對不規(guī)則物體的抓取
5、對水果等其它易損易變性物體的無損傷抓取
6、雙機(jī)器人協(xié)調(diào)裝配
7、機(jī)器人模仿跟隨





客戶服務(wù)電話:
027-87018711
 掃描二維碼關(guān)注我們
掃描二維碼關(guān)注我們
聯(lián)系電話:李經(jīng)理 13720126958 陳經(jīng)理 13387619634 郵箱:wheckert@126.com
公司地址:湖北省武漢東湖新技術(shù)開發(fā)區(qū)關(guān)東街道湯遜湖北路36號武漢理工大科技園新能源研發(fā)基地2棟08層801
版權(quán)所有 ©2019-2050 武漢艾克特科技有限公司 鄂ICP備19030040號-1